 LAB FOR AUTOMATIC
CONTROL AND DECISION SYSTEMS
LAB FOR AUTOMATIC
CONTROL AND DECISION SYSTEMS |
|
|
| |
|
|
| |
MPC MOTION
PLANNING ON ROUGH TERRAINS
(in bosnian) |
|
| |
|
|
| |
STUDENT: Nadir Kapetanović THESIS ABSTRACT:
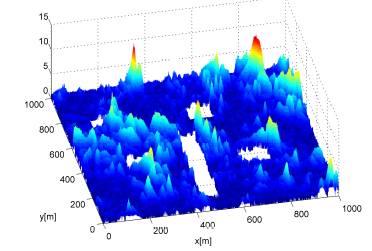 Path
planning and control for a mobile vehicle which
has to accomplish some mission, some of the
crucial problems in the field of mobile
robotics, especially if the vehicle moves on a
large scale rough terrain with obstacles. In
order to guarantee that the mission will be
accomplished, path planner has to find the most
traversable path from some given starting
location to the goal location in the map, while
ensuring the physical integrity of the vehicle,
but also avoiding obstacles, and preventing
roll-over and slip-off phenomena. In this thesis
one such planner is presented, which is based on
merging model predictive control with Wavefront
RbNF algorithm into one generic path planning
framework, which takes into account path
traversability, distance from the goal location,
system model, and constraints on states and
control. Wavefront RbNF algorithm is developed
as an extension of the existing RbNF algorithm.
It represents a fast approximation of the
optimal cost-to-go map in terms of
traversability on known large scale rough
terrains, since computation of the optimal
cost-to-go map for large scale terrains is very
expensive in terms of computer resources, both
in terms of execution time and RAM memory.
Thorough simulation results show that the
majority of cost-to-go map values, calculated
for every location on the map with respect to
the goal location, are near-optimal. As opposed
to Dijkstra an A* algorithms, the proposed
algorithm has an inherently parallel structure,
which allows its execution time to be
significantly faster, depending on the number of
CPU cores used. The main advantages of using
model predictive control for a path planner are
twofold. First, such planner would generate
trajectories which a mobile vehicle could
follow, which is often not the case in the
state-of-the-art path planning algorithms.
Second, these trajectories would be optimal in
terms of system model, constraints on Path
planning and control for a mobile vehicle which
has to accomplish some mission, some of the
crucial problems in the field of mobile
robotics, especially if the vehicle moves on a
large scale rough terrain with obstacles. In
order to guarantee that the mission will be
accomplished, path planner has to find the most
traversable path from some given starting
location to the goal location in the map, while
ensuring the physical integrity of the vehicle,
but also avoiding obstacles, and preventing
roll-over and slip-off phenomena. In this thesis
one such planner is presented, which is based on
merging model predictive control with Wavefront
RbNF algorithm into one generic path planning
framework, which takes into account path
traversability, distance from the goal location,
system model, and constraints on states and
control. Wavefront RbNF algorithm is developed
as an extension of the existing RbNF algorithm.
It represents a fast approximation of the
optimal cost-to-go map in terms of
traversability on known large scale rough
terrains, since computation of the optimal
cost-to-go map for large scale terrains is very
expensive in terms of computer resources, both
in terms of execution time and RAM memory.
Thorough simulation results show that the
majority of cost-to-go map values, calculated
for every location on the map with respect to
the goal location, are near-optimal. As opposed
to Dijkstra an A* algorithms, the proposed
algorithm has an inherently parallel structure,
which allows its execution time to be
significantly faster, depending on the number of
CPU cores used. The main advantages of using
model predictive control for a path planner are
twofold. First, such planner would generate
trajectories which a mobile vehicle could
follow, which is often not the case in the
state-of-the-art path planning algorithms.
Second, these trajectories would be optimal in
terms of system model, constraints on
states and control, and the given optimization
criterion. Simulation results show that the use
of this planner is justified, since it gives
very good results for the examples of path
planning on large scale rough terrains with
obstacles. This way, the most traversable path
is generated for the vehicle to follow, i.e. the
least rough path towards the goal location.
Additionally, the vehicle avoids obstacles with
an extra security requirement: that it must not
come closer to the obstacles than some
predefined distance,
and it also makes softer turns compared to a
much simpler realisation gradient method
generated paths.
|
|
| |
|
|
| |
TERRAIN CLASSIFICATION FOR MOBILE VEHICLE PLANNING ON ROUGH TERRAINS
(in bosnian) |
|
| |
|
|
| |
STUDENT: Amel Selimovic
THESIS ABSTRACT:
 The aim of this work is to analyze how different terrain features influence autonomous vehicle mobility index. Some terrain features can significantly influence vehicles mobilitiy index, which mostly occurs when the vehicles face uneven terrains. An inadequate analysis of these features and an inadequate terrain classification may cause similar problems such as the one that NASA's Mars exploration mission faced, when its autonomous vehicle had been stuck for some weeks. Detection or estimation of physical terrain features is important for ensuring vehicle safety. Further knowledge of terain features can improve vehicles motion prediction and help the vehicles to avoid terrain regions that would prevent the vehicle to complete its mission. Furthermore, avoiding regions with low mobility indexes would also reduce necessary power consumption. This work presents several classification techniques used for detection of different terrain characteristics (e.g., terrain color, terrain texture) which are necesary to successfully determine type of terrain and its mobility index. In addition, a moethod of using these terrain classification techniques for autonomous vehicle path planning has been implemented and presented.
The aim of this work is to analyze how different terrain features influence autonomous vehicle mobility index. Some terrain features can significantly influence vehicles mobilitiy index, which mostly occurs when the vehicles face uneven terrains. An inadequate analysis of these features and an inadequate terrain classification may cause similar problems such as the one that NASA's Mars exploration mission faced, when its autonomous vehicle had been stuck for some weeks. Detection or estimation of physical terrain features is important for ensuring vehicle safety. Further knowledge of terain features can improve vehicles motion prediction and help the vehicles to avoid terrain regions that would prevent the vehicle to complete its mission. Furthermore, avoiding regions with low mobility indexes would also reduce necessary power consumption. This work presents several classification techniques used for detection of different terrain characteristics (e.g., terrain color, terrain texture) which are necesary to successfully determine type of terrain and its mobility index. In addition, a moethod of using these terrain classification techniques for autonomous vehicle path planning has been implemented and presented.
|
|
| |
|
|
| |
CHANCE
CONSTRAINED
MPC - HVAC
(in bosnian) n bosnian) |
|
| |
|
|
| |
STUDENT: Šalaka Edin
THESIS ABSTRACT:
The focus of this work is given to the
robustness of model predictive control (MPC)
with respect to uncertainties that might
influence the outputs of the system and thereby
the constraints imposed on those outputs. Unlike
the robust approach that guarantee constraints
are satisfied even for worst case scenarios,
which can be rather conservative in some
applications, chance constrained MPC
optimization framework guarantees the imposed
constraints will not be violated with some a
priori chosen probability. Chance constraint MPC
utilizes the probability density function of the
uncertainty present in the system and solve
repeatedly an appropriate convex optimization
problem.
The proposed approach is presented and validated
through the application of energy management in
intelligent buildings to solve an HVAC (heating,
ventilation and air conditioning) problem.
|
|
| |
|
|
| |
COOPERATIVE CONTROL OF MULTIPLE VEHICLES
(in bosnian) |
|
| |
|
|
| |
STUDENT: Bostan Aldin THESIS ABSTRACT:
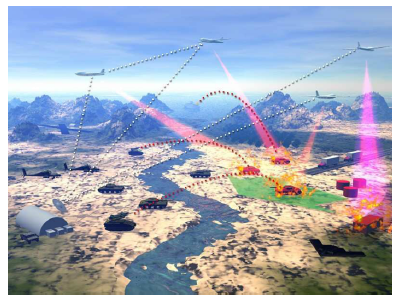 The
paper presents a new solution to the
multi-vehicle coverage problem. The proposed
algorithm guarantees complete coverage and
provides collaborative behaviors of vehicles,
despite the fact that it does not explicitly
exploit any computationally
intensive optimization technique. The algorithm
can deal with any mission domain, including
regions with irregular shapes, multi-connected
and disjoint regions. It gives reasonably good
solutions for partially connected multi-vehicle
systems. The
paper presents a new solution to the
multi-vehicle coverage problem. The proposed
algorithm guarantees complete coverage and
provides collaborative behaviors of vehicles,
despite the fact that it does not explicitly
exploit any computationally
intensive optimization technique. The algorithm
can deal with any mission domain, including
regions with irregular shapes, multi-connected
and disjoint regions. It gives reasonably good
solutions for partially connected multi-vehicle
systems.
|
|
| |
|
|
| |
CONSTRAINED COVERAGE PROBLEM WITH
MULTIPLE VEHICLES
(in bosnian) |
|
| |
|
|
| |
STUDENT: Benjamin Seferagić THESIS ABSTRACT:
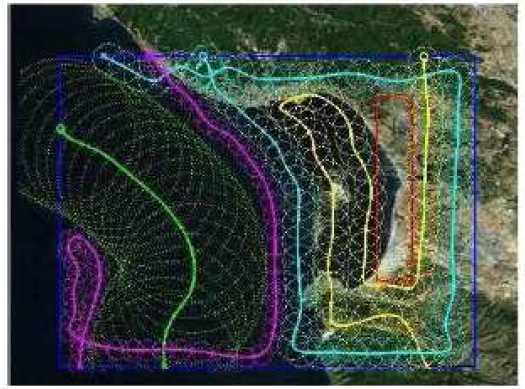 A
cooperative way of solving problems has been
popular for a long time in scientific A
cooperative way of solving problems has been
popular for a long time in scientific
community, especially in control theory. Great
attention is dedicated to cooperative control of
multi - vehicle systems because of their
benefits in terms of completing a task more
efficiently and the extent of work a group of
vehicles can do in comparison to a single one.
Cooperative system control of vehicles or
sensors has found its use in many areas among
which applications arose in military field are
the most popular ones. Some of the applications
have been recognized as rather useful such as
those related to military resource organization
as in case of unmanned terrain and aerial
vehicles. In this paper one aspect of
cooperative control has been studied, which is
known as the coverage problem. This problem is
actually inherently included in most
applications of the cooperative control,
including the autonomous sensor arrangements,
routing, planning, following, as well as
rescuing, mowing, cleaning, extinguishing fires,
and so on. Using GPOPS, which is a toolbox made
for MATLAB users for solving optimal control
problems by the means of pseudospectral methods,
an algorithm for covering space with a
heterogeneous multi - vehicle system, where each
vehicle has a defined task duration time, has
been developed. The vehicles have also a defined
starting and ending point. In addition,
simulation results have been shown in the paper
and some appropriate conclusions have been
derived with respect to some further possible
research directions within this field.
|
|
| |
|
|
| |
MPC IN THERMAL POWER PLANTS
(in bosnian)) |
|
| |
|
|
| |
STUDENT: Faris Delić THESIS ABSTRACT:
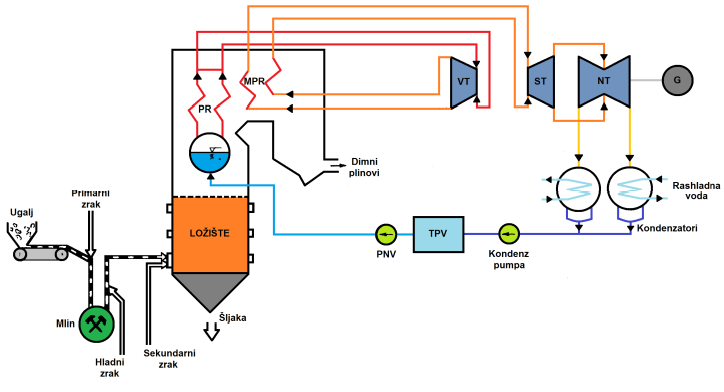 A
thermal power plant is a complex system intended
for multistep conversion of A
thermal power plant is a complex system intended
for multistep conversion of
energy. A very important factor for a safe and
economical process in thermal power
plants is a quality realization of the control
process. Nowadays, advanced control
methods introduced in modern power plants,
independent or in the combination with
classical methods, cause enhancement of the
power plants performances. The subject of this
master thesis is the presentation of one
advanced control tehnique – model predictive
control (MPC) in the control process of a fossil
fueled power plant. A thermal power plant
control system based on the combination of
classical and model predictive control is
analized. Then, the superheated steam
temperature control system based on the
classical and model predictive control is
presented, and a comparation between both
control methods is conducted. Finally, based on
the input – output data collected at the thermal
power plant in Tuzla, a system identification of
a two stage power plant superheater is carried
out and an appropriate model predictive control
is designed.
|
|
| |
|
|
| |
AUTOMATED INSERTION OF GEOPHONES USING
LIGHT-WEIGHT ROBOTS
(in bosnian and english) |
|
| |
|
|
| |
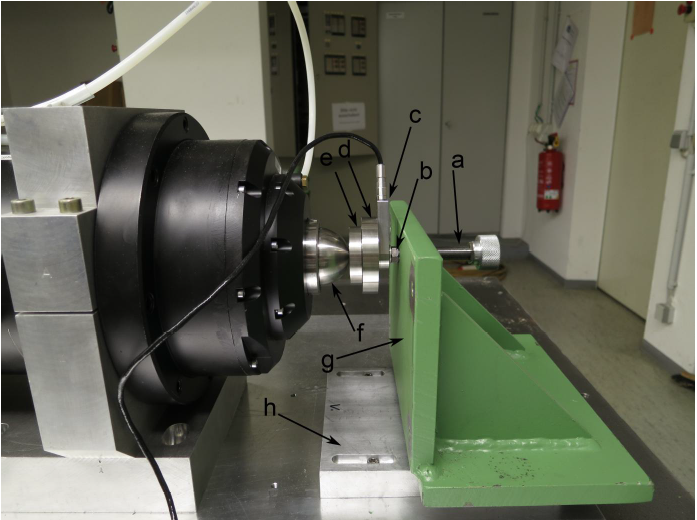
STUDENT: Selma Musić THESIS ABSTRACT:
 Manual
installation of seismic networks, i.e.,
geophones in extraterrestrial applications or in
extreme environments on Earth is risky,
expensive and error-prone. A more reliable
alternative of inserting sensors into soil is
the automatic deposition with a leight-weight
robot manipulator. However, inserting a sensor
into soil is a challenging task for robotic
control since the soil parameters are variable
and di cult to estimate. Therefore, this thesis
investigates an approach to accurate insertion
and positioning of geophones using a Cartesian
impedance controller with Manual
installation of seismic networks, i.e.,
geophones in extraterrestrial applications or in
extreme environments on Earth is risky,
expensive and error-prone. A more reliable
alternative of inserting sensors into soil is
the automatic deposition with a leight-weight
robot manipulator. However, inserting a sensor
into soil is a challenging task for robotic
control since the soil parameters are variable
and di cult to estimate. Therefore, this thesis
investigates an approach to accurate insertion
and positioning of geophones using a Cartesian
impedance controller with
a feed-forward force term. The feed-forward
force component of the controller is estimated
using the earth-moving equation and the Discrete
Element Method. For the rst time, both the
geological aspects of the problem as well as the
aspects of
robotic control are considered. Based on this
consideration, the control approach is enhanced
by predicting the resistance force of the soil.
Experiments with the humanoid robot Rollin'
Justin inserting a geophone into three di erent
soil samples validate the chosen approach.
All experiments
have been
conducted at
DLR,
Germany.
|
|
| |
|
|
| |
MODEL
PREDICTIVE CONTROL IN SOLAR POWER PLANTS (in
bosnian) |
|
| |
|
|
| |
STUDENT: Haris Causevic
THESIS ABSTRACT:
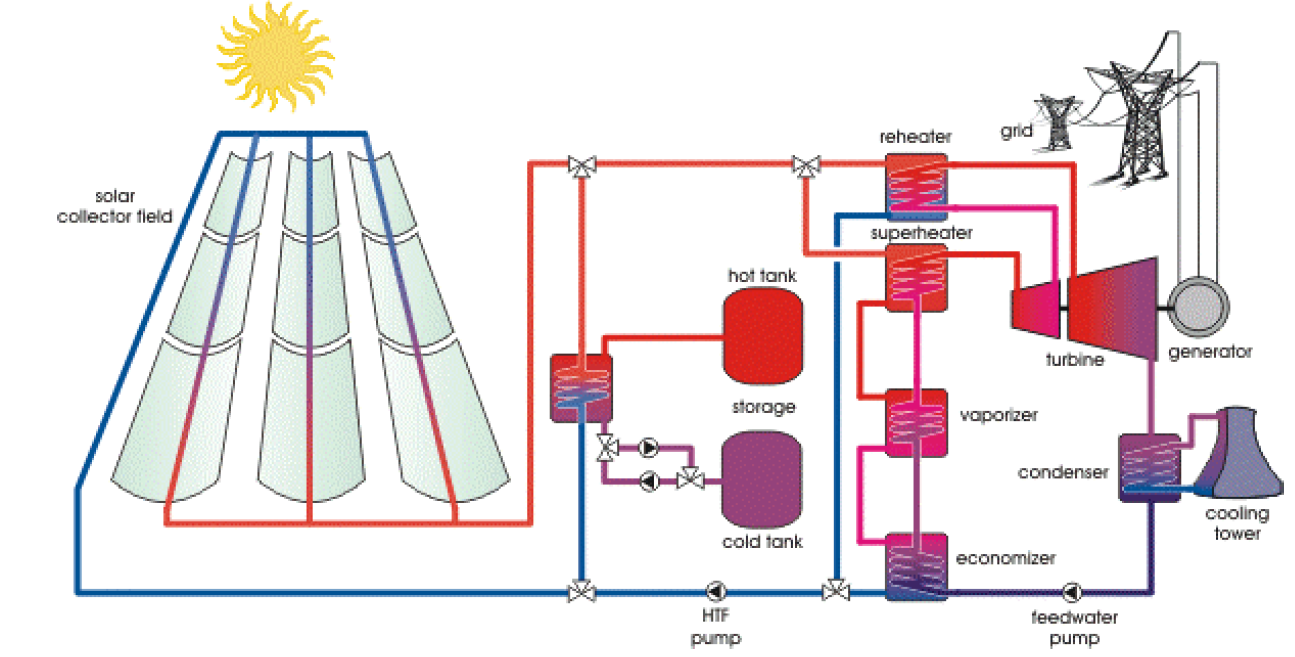 Solar
radiation is an environmentally friendly, the
largest, most affordable energy source on Earth.
Adequate utilization of a small portion of this
energy can meet Earths electricity needs. The
research work has found that there are two basic
technologies of producing electricity using
solar radiation. In addition to economically
dominant technology photo-cell, in the last 15th
years arises the renewed interest for
concentrating parabolic trough technology (since
1980) which can accumulate a greater amount of
energy, and thus improving the conditions of
availability, integration into the power grid.
Price competitiveness of this technology, in
addition to reducing the cost of individual
elements of the system, can be also achieved by
using an adequate control strategies that can
increase efficiency, and the number of
operational hours. This works describes the
aforementioned technology, with emphasis on
basic control needs, on which it is possible to
accomplish these objectives. The result of these
studies has shown that monitoring the movement
od the Sun and an improved ability to reject
disturbances, increase efficiency and the number
of operational hours. For the purpose of
detailed analysis, an adequate modeling of
Acurex test plant Almeria (Spain) has been
performed along with the identification of
incident angle modifier, which defines parabolic
troughs efficiency, using the CMA (Covariance
Matrix Adaptation) evolution strategy. By using
simulation analysis of this model dominant
disturbances which may impair the efficient
operation of this type of power plants, have
been identified. These disturbances are: changes
in solar radiation (fast disturbance), and
changes in inlet temperature collector array
(slow disturbance), and they might cause
significant deviation from the optimum output
temperature. Given the basic characteristics of
this system in the form of non-stationarity,
time delay, nonlinearity, disturbances, model
predictive control has been turned out to be a
good choice of control strategy. This control
strategy uses a linear model in state space,
which is a result of linearization at each
sampling point. For the purposes of state
estimation, nonlinear form of Kalman filter UKF
(Unscented Kalman Filter) is used. This approach
has resulted in a very good elimination of slow
disturbances (increasing the number of
operational hours at the beginning of the day),
with appropriate behavior due to the effects of
fast disturbances. A possible improvment of the
control strategy, given in the form of model
predictive control, regards the use of an
appropriate prediction model of solar radiation
within the optimization framework. Solar
radiation is an environmentally friendly, the
largest, most affordable energy source on Earth.
Adequate utilization of a small portion of this
energy can meet Earths electricity needs. The
research work has found that there are two basic
technologies of producing electricity using
solar radiation. In addition to economically
dominant technology photo-cell, in the last 15th
years arises the renewed interest for
concentrating parabolic trough technology (since
1980) which can accumulate a greater amount of
energy, and thus improving the conditions of
availability, integration into the power grid.
Price competitiveness of this technology, in
addition to reducing the cost of individual
elements of the system, can be also achieved by
using an adequate control strategies that can
increase efficiency, and the number of
operational hours. This works describes the
aforementioned technology, with emphasis on
basic control needs, on which it is possible to
accomplish these objectives. The result of these
studies has shown that monitoring the movement
od the Sun and an improved ability to reject
disturbances, increase efficiency and the number
of operational hours. For the purpose of
detailed analysis, an adequate modeling of
Acurex test plant Almeria (Spain) has been
performed along with the identification of
incident angle modifier, which defines parabolic
troughs efficiency, using the CMA (Covariance
Matrix Adaptation) evolution strategy. By using
simulation analysis of this model dominant
disturbances which may impair the efficient
operation of this type of power plants, have
been identified. These disturbances are: changes
in solar radiation (fast disturbance), and
changes in inlet temperature collector array
(slow disturbance), and they might cause
significant deviation from the optimum output
temperature. Given the basic characteristics of
this system in the form of non-stationarity,
time delay, nonlinearity, disturbances, model
predictive control has been turned out to be a
good choice of control strategy. This control
strategy uses a linear model in state space,
which is a result of linearization at each
sampling point. For the purposes of state
estimation, nonlinear form of Kalman filter UKF
(Unscented Kalman Filter) is used. This approach
has resulted in a very good elimination of slow
disturbances (increasing the number of
operational hours at the beginning of the day),
with appropriate behavior due to the effects of
fast disturbances. A possible improvment of the
control strategy, given in the form of model
predictive control, regards the use of an
appropriate prediction model of solar radiation
within the optimization framework.
|
|
| |
|
|
| |
FLATNESS-BASED CONTROL
(in bosnian and english) |
|
| |
|
|
| |
STUDENT: Goran Huskić THESIS ABSTRACT:
In this work, flatness-based control basics are
presented. Two examples are presented: a mobile
robot and a magnetically supported spindle.
Mobile robot is described theoretically, while
the part with the spindle was mostly
experimental. A magnetically supported spindle
can be driven at very high speeds, and as it
levitates, there is neither friction nor
mechanical wear. This type of spindles is
increasingly popular in industry, but the
control of the active bearings is challenging.
There is a nonlinear relation between the coil
current, shaft position and the force
which accelerates the shaft, and also a lot of
nonlinearities in the system that need to be
considered. To control one axial bearing, an
exact relationship between these quantities is
required. With a good model, an efficient
real-time control can be implemented and the
sensor features of the bearing can be used to
measure the force or the position.
Flatness-based control of the spindle is
described, a mathematical model of an axial
bearing is derived, and the parameters of the
model are experimentally identified. The sensors
used for the experiments are analyzed, as well
as the deformation of the disc in the stator.
Results of the identification are discussed and
a suggestion for the further research is given.
All the work and experiments have been done and
conducted at
Saarland University, Germany.
|
|
| |
|
|
| |
MPC IN BIOMEDICAL SYSTEMS
(in bosnian) |
|
| |
|
|
| |
STUDENT: Naida Škaljić THESIS ABSTRACT:
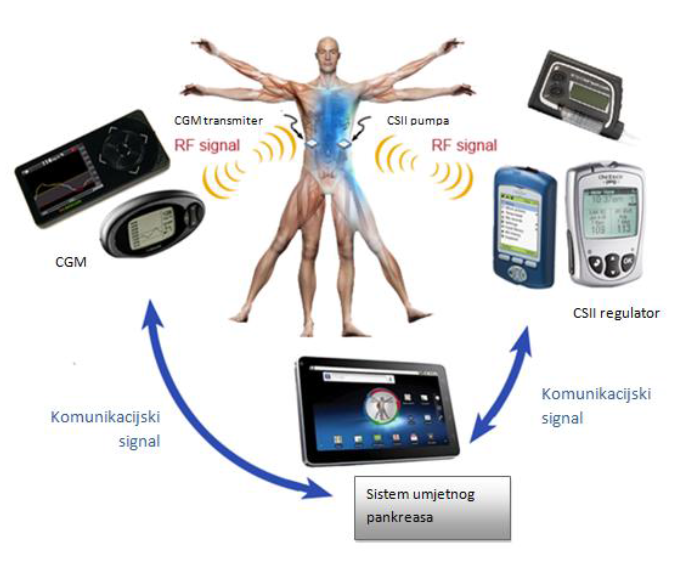
Applying knowledge from engineering sciences to
formulate solutions for medical problems has
given fruitful results; many solutions have been
successfully implemented. One such example of a
modern application of a closed-loop control is
an artificial pancreas system. The aim of the
artificial pancreas is to treat diabetes by
continuously maintaining glucose levels in the
permitted boundaries, in a manner which is
neither aggresive nor difficult for the patient.
Controlling glucose levels is done by
continuously delivering insulin by an insulin
pump. The insulin pump is controlled by an
algorithm, which uses glucose concentration
levels measured in the blood. This thesis
explores the implementation of advanced control
methods in biological systems. Furthermore, the
paper explains the different modelling methods
of biological systems, a review of model forms
and examples of specific models used for control
algorithms. A detailed review is given for the
artificial pancreas system, the accent on the
needs and advantages of such a system.
Furthermore, the characteristics of the system’s
elements are given, the focus being on the
mathematical models used for the glucose-insulin
dynamics, and also the control algorithms which
have already been implemented, or which will be
implemented if the required research is
conducted. For the implementation of the NMPC
control, an augumented minimal model of the
glucose-insulin system was used. Also, a model
of glucose disturbance was given, which was used
as a basis to implement the control. The NMPC
control was implemented in the Matlab toolbox
Gpops, which solves optimal control problem
using pseudospectral methods. Correspondingly,
an adaption of the optimal problem of open loop
control was used to design the NMPC control.
Finally, several different simulations were
undertaken, each with a different approach to
solve the control problem. The acquired results
are quite satisfactory. Given results are
analyzed, and references for further researches
are given.
|
|
| |
NONLINEAR MPC
(in bosnian) |
|
| |
|
|
| |
STUDENT: Samir
Džuzdanović THESIS ABSTRACT:
Model predictive control (MPC) is a control
strategy that is suitable for optimizing the
performance of constrained systems. Constraints
are present in all systems due to physical or
environmental limits on plant operation. MPC is
able to handle these constraints in a systematic
way. Along with constraints, tighter performance
specifications can only be satisfied by an
explicit inclusion of process nonlinearities in
the controller. In this thesis a framework for
simulating nonlinear MPC is realized, based on
the pseudospectral optimal control solver GPOPS.
Different systems with different specifications
and different constraints have been analyzed,
and their sensitivity on prediction horizon and
sampling time parameters has been tested. At
last, stability issues of the model predictive
controller were analyzed in regard of control
Lyapunov functions.
|
|
| |
|
|
| |
MPC IN HYDROPOWER PLANTS
(in bosnian) |
|
| |
|
|
| |
STUDENT: Aida
Čaršimamović THESIS ABSTRACT:
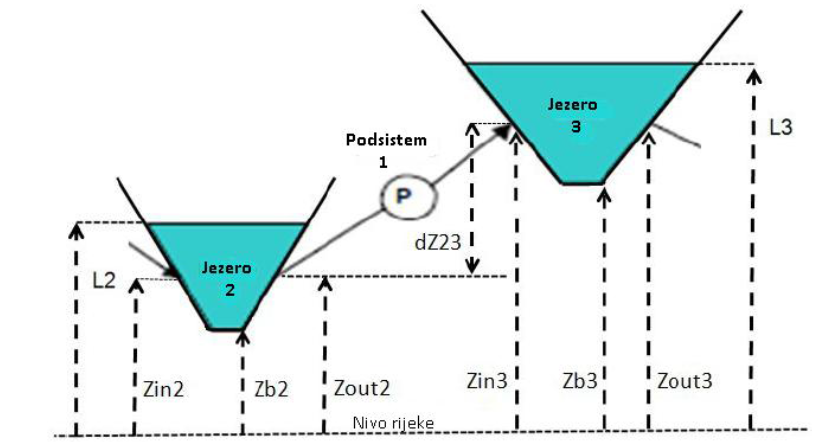
The importance of the usage of renewable power
sources, such as hydropower, rises due to the
necessity of the CO2
pollution reduction. That is why huge efforts
are being made in the field of the hydropower
efficiency enhancement. It is possible, using
optimal distribution of power sources, to
maximize efficiency of the hydropower valley. In
this assignment, for the existing model of
hydropower valley, we develop a Model Predictive
Control (MPC) controller providing that the
electrical production successfully follows
demand side of the electrical power consumption
while considering constraints regarding changes
of water level and water flow rate in lakes and
reaches, which should be within given range and
as far as possible from the limits.
We use MPC toolbox in order to develop MPC
controller. Parameters of the controller, such
as: prediction horizon, control interval and
control horizon, are chosen in such a way that
controller successfully follows demand side of
the electrical power consumption while the
changes of power are obtained in minimal numbers
of hydropower plant units. Experiments conducted
on the simulation model and corresponding
results are given, confirming that the results
of the MPC control with variable water flow
rates through the system and in the presence of
disturbances are similar to those with constant
flow rates, meaning that the MPC is a good
control strategy to deal with the efficiency of
hydropower valley.
|
|
| |
|
|
| |
