 LAB FOR COOPERATIVE ARTIFICIAL
INTELLIGENCE AND ADVANCED CONTROL SYSTEMS LAB FOR COOPERATIVE ARTIFICIAL
INTELLIGENCE AND ADVANCED CONTROL SYSTEMS |

Prof Adnan Tahirovic
University of Sarajevo,
Faculty of Electrical Engineering,
Department of Automatic Control
|
| |
|
|
| |
MORUS - UNMANNED SYSTEM
FOR MARITIME SECURITY AND ENVIRONMENTAL MONITORING
|
|
| |
|
|
| |
PROJECT ABSTRACT:
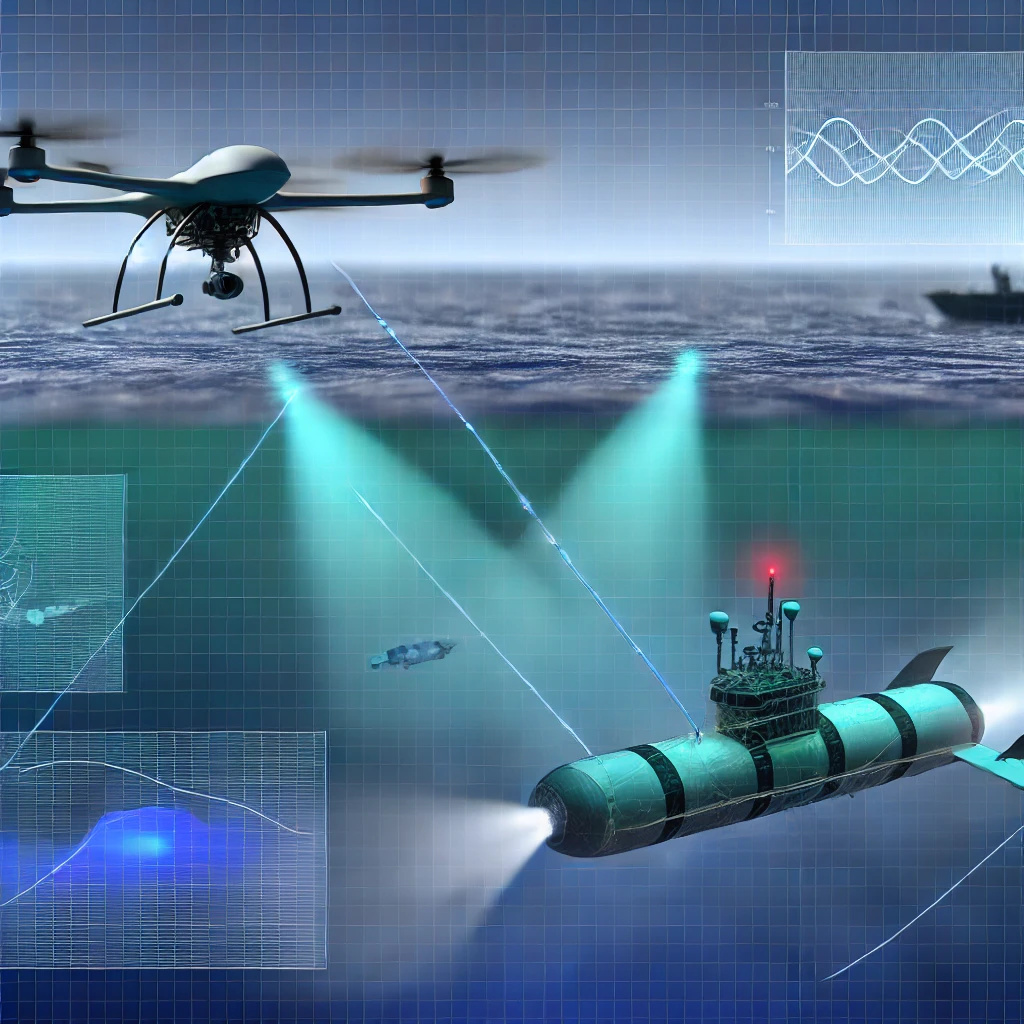
The MORUS project focuses on designing a
multi-agent system prototype that integrates an Unmanned Aerial Vehicle
(UAV) and an Unmanned Underwater Vehicle (UUV) for autonomous,
cooperative missions in environmental monitoring, border surveillance,
and port security. In a dynamic and unpredictable environment, the
project developed novel cooperative control algorithms, enabling the
UAV and UUV to operate as a cohesive multi-agent system capable of
autonomous deployment, redeployment, and data exchange in remote,
open-sea conditions.Central to the project was the creation of
advanced algorithms for multi-agent systems that facilitated real-time
cooperation between the UAV and UUV, addressing challenges posed by
uncertain and rough environments. The UAV’s enhanced autonomy, along
with an innovative docking mechanism and visual feedback-based gripping
algorithm, allowed it to transport and redeploy the UUV with minimal
human intervention. By integrating these cooperative control
strategies, the MORUS project made substantial advancements in
multi-agent system algorithms, demonstrating new capabilities for
coordinated UAV-UUV operations in real-world applications.
Name: Unmanned
system for maritime security and environmental monitoring
Acronym: MORUS
Funding scheme:
NATO Science for Peace Programme
Total budget:
834,929.00 EUR
Total budget for
UNSA-ETF: 100,000.00 EUR
Start and end dates:
10/04/2015 - 28/02/2019
Project lead on
behalf of UNSA-ETF: Prof Adnan Tahirovic
Project website:
http://fer.hr/morus
Project partners:
Faculty of Electrical Engineering and Computing Zagreb (Croatia), University of
Limerick (Ireland), University of Dubrovnik (Croatia)
Relevant fields:
Optimal control, Multi-agent systems, Machine learning
|
| |
|
|
| |
AeroSTREAM
- STREANGTHENING RESERACH AND INNOVATION EXCELLENCE IN AUTONOMOUS
AERIAL SYSTEMS
|
|
| |
|
|
| |
PROJECT ABSTRACT:

Strengthening Research and Innovation Excellence in Autonomous Aerial
Systems - AeroSTREAM is a Horizon Europe CSA project funded by the EU
through the HORIZON-WIDERA-2021-ACCESS-05 program, running from 1 July,
2022 till 30 June 2025. The primary goal of the project is to enhance
the research and innovation capacities of higher education institutions
from widening countries (wHEIs), specifically from Croatia and Bosnia
and Herzegovina. The specific field of interest is in autonomous robotic systems, with a
focus on multi-agent systems based on autonomous aerial vehicles and
their applications in agriculture, forestry, and logistics. The project
also aims to establish a long-term, sustainable collaboration between
project participants and their local partners. Participating ganisaions include leading international
higher education institutions from Spain, the Czech Republic, and the
Netherlands. The project effort is further supported through close cooperation
with FADA-CATEC and the Technological Corporation of Andalusia, leading
European organizations recognized for their strong research and
innovation capabilities.
Name:
Strengthening Research and Innovation Excellence in Autonomous Aerial
System
Acronym:
AeroSTREAM
Funding scheme: EU
HORIZON-WIDERA-2021-ACCESS-05 programme
Total budget:
1,995,700.00 EUR
Total budget for
UNSA-ETF: 138,500.00 EUR
Start and end dates:
1/7/2022 - 30/6/2025
Project lead on
behalf of UNSA-ETF: Prof. Adnan Tahirovic
Project website:
https://aerostream.fer.hr/
Project partners:University of Zagreb (Croatia),
Universidad de Sevilla (Spain), Technological Corporation of Andalusia - CTA (Spain), Advanced Center for Aerospace Technologies - CATEC (Spain), Czech Technical University in Prague - Faculty of Electrical Engineering (Czech Republic), Innovation Center
Nikola Tesla (Croatia), Prostar Labs (Croatia), Universiteit Twente
(Netherlands), Fly4Future (Czech Republic), Saxion University of Applied Sciences (Netherlands)
Relevant fields:
Mobile robotics, AI, Multi-agent systems, Reinforcement learning,
Optimal control, Network systems
|
| |
|
|
| |
MARBLE - MARITIME ROBOTICS
IN BLUE ECONOMY
|
|
| |
|
|
| |
PROJECT ABSTRACT:

The MARBLE project aims to elevate competencies and skills in
multi-agent systems in maritime robotics applications within the blue
economy through the development of an innovative joint master’s program
titled “MARBLE – Maritime Robotics in Blue Economy.” This initiative
involves implementing joint training programs organized by a consortium
of universities, research institutions, business clusters, and a
digital innovation hub. The MARBLE project’s objectives include
establishing a collaborative network of academic and industry partners
focused on skill enhancement and capacity building in maritime robotics
for the blue economy. This network hosts a series of networking
events, study visits, educational methodology seminars, and knowledge
transfer sessions, offering participants insights into best practices
within the field. Additionally, the project seeks to advance knowledge
and skills in sustainable blue economy practices within the
Adriatic-Ionian region. Through specialized training courses and a
hackathon centered on blue economy challenges, the project promotes
innovative, technology-driven solutions. Finally, MARBLE will prepare
the documentation necessary to establish a joint Master’s program in
maritime robotics for the blue economy. This includes accreditation
documents, a comprehensive curriculum, administrative guidelines, and a
framework for university collaboration and student mobility.
Name:
Maritime Robotics in Blue Economy
Acronym:
MARBLE
Funding scheme:
EU Interreg Adrion Program, IPA 2
Total budget:
1,099,425.00 EUR
Total budget for
UNSA-ETF: 141,590.00 EUR
Start and end dates:
2/1/2023 – 30/9/2023
Project lead on
behalf of UNSA-ETF: Prof Adnan Tahirovic
Project website:
https://marble.adrioninterreg.eu/
Project partners:
University of Zagreb Faculty of Electrical Engineering and Computing
(Croatia), University of Trieste (Italy), Maritime Technology Cluster
FVG S.c.a.rl. (Italy), National Institute of Oceanography and Applied
Geophysics OGS (Italy), National technical University of Athens NTUA
(Greece), University of Montenegro, Digital innovation hub (DIH)
Agrifood (Croatia)
Relevant fields:
Mobile robotics, AI, Machine learning, Multi-agent
systems, Reinforcement learning, Optimal control
|
| |
|
|
| |
HUMAN BRAIN MODELING
|
|
| |
|
|
| |
PROJECT ABSTRACT:

This project seeks to develop an advanced model of the human brain by
integrating brain measurements with computational tools, specifically
focusing on multi-agent systems, network flow algorithms, graph theory,
and graph neural networks. Using multi-agent systems as a foundational
approach, the project aims to interpret the brain's complex network
dynamics, simulating neural interactions as coordinated agents that
represent distinct functional regions. This multi-agent perspective
enables a deeper exploration of how various brain states—such as
attention, rest, and cognitive processing—emerge and transition based
on measurable neural activity. By modeling brain function as a system
of interacting agents, each
representing specific neural circuits, we can better understand the
underlying patterns and connectivity within the brain. Network flow
algorithms and graph neural networks play a central role in
capturing these dynamic relationships, identifying how certain pathways
correspond to distinct cognitive states. This innovative approach not
only advances our understanding of neural interactions but also opens
new avenues for detecting and differentiating between brain states through
data-driven, agent-based modeling. Ultimately, this research could
inform the development of advanced tools for brain health monitoring, while
enhancing cognitive function through a sophisticated multi-agent
view of brain networks.
Name: Human
Brain Modeling (current stage: research grant preparation)
Funding scheme:
Visiting research position, Imperial College London
Project lead:
Prof. Adnan Tahirović
Project supported by:
Imperial College London, Brain Science Department, Bioengineering Department, Faculty of Medicine, Imperial College Healthcare NHS Trust
Start and end dates: 2018, 2019, 2024 - To date
Relevant fields: Computational
neuroscience, Multi-agent
systems, Machine learning, AI
|
| |
|
|
| |
DECODING HUMAN BRAIN SPELLING
|
|
| |
|
|
| |
PROJECT ABSTRACT:
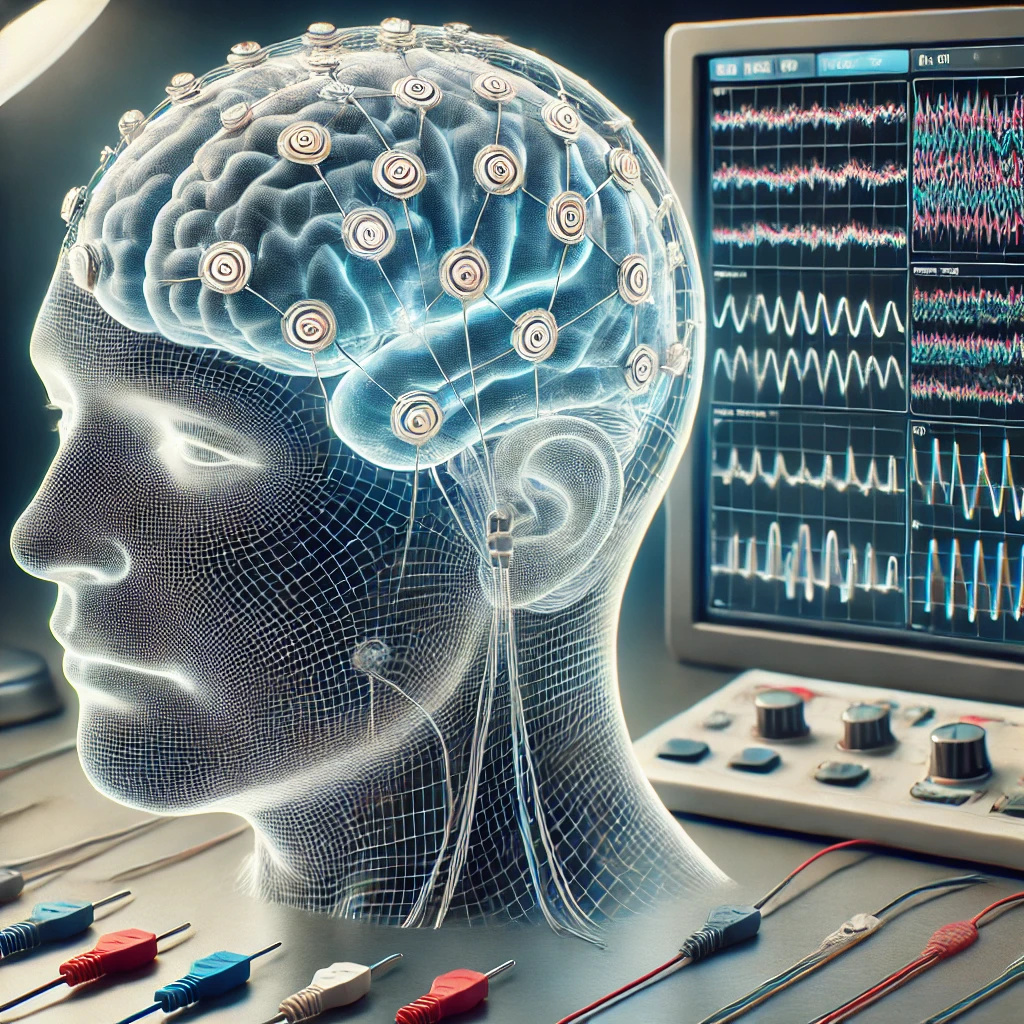
The project addresses decoding human brain spelling intentions using P300 signals. It introduces an innovative algorithm for enhancing the spatial distribution analysis of the P300 component within event-related potentials (ERPs) using EEG measurements, a vital tool in neurophysiology for assessing cognitive function. This approach employs Independent Component Analysis (ICA) to isolate P300 signals from multiple target epochs, creating a personalized spatial distribution template for each user. This customized averaging technique reduces noise and improves signal reliability, enhancing the accuracy of P300 detection and extraction. The algorithm achieves rapid convergence after processing only a few target epochs, making it highly adaptable without requiring extensive training data. The improved precision in P300 detection is particularly beneficial for applications such as brain-computer interfaces (BCIs), where spatial filtering is essential, advancing both diagnostic and therapeutic uses in cognitive and neurological health.
Name: P300 Spelling Algorithm
Funding scheme:
Fellowship, Politecnico di Milano
Start and end dates:
2008-2009
Project lead:
Adnan Tahirovic
Relevant fields: Computational
neuroscience, Multi-agent
systems, Machine learning, AI
|
| |
|
|
| |
OPTIMAL CONTROL FOR
GLUCOSE REGULATION
|
|
| |
|
|
| |
PROJECT ABSTRACT:
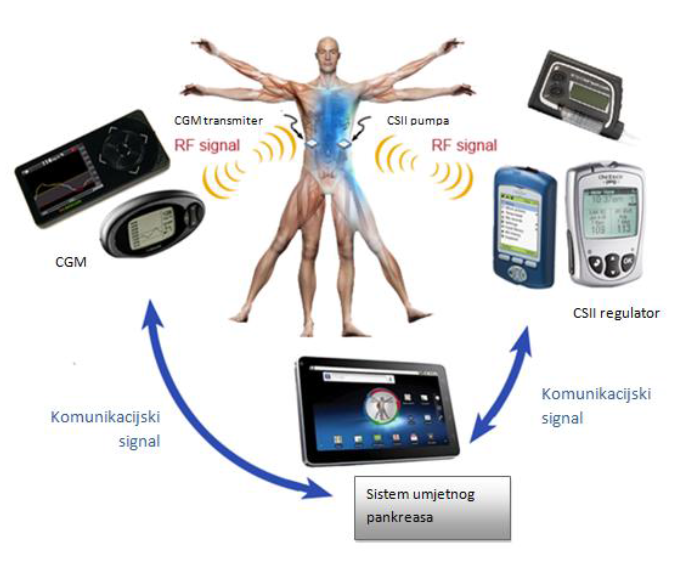
This project investigates the application of
advanced control methods in biological systems, focusing on the
development and implementation of a closed-loop artificial pancreas
system for diabetes management. The artificial pancreas is designed to
maintain glucose levels within safe boundaries, through continuous
insulin delivery regulated by a control algorithm. By adjusting insulin
dosing based on real-time blood glucose measurements, this system
offers an effective, patient-friendly solution to glucose control.The
project reviews various modeling approaches and control algorithms for
biological systems, with a particular focus on the artificial pancreas.
Key components are analyzed, including mathematical models that
describe glucose-insulin dynamics and control algorithms currently
implemented or under development. An augmented minimal model of the
glucose-insulin system was utilized to implement Nonlinear Model
Predictive Control (NMPC), with a glucose disturbance model serving as
a foundation. NMPC was implemented in MATLAB using the Gpops toolbox,
which applies pseudospectral methods to solve optimal control problems.
Through multiple simulations with different control strategies, the
project demonstrates the effectiveness of NMPC in managing glucose
levels. These findings provide valuable insights for advancement of
artificial pancreas systems and lay the groundwork for further research.
Name:
Advanced Control Strategies for Artificial Pancreas Systems:
Implementing Nonlinear Model Predictive Control for Optimized Glucose
Regulation
Project lead: Prof. Adnan Tahirović
Relevant fields: Optimal
control, Machine learning, AI
|
|
|